Machine Vision & Sample Transport Systems
Mara Robot
Research Goals
Laboratory automation has demonstrated great potential in accelerating the discovery and optimization of new materials. However, the lack of low cost high-throughput characterization has been a limiting factor in the development of autonomous self-driving labs.
To address this, my research revolves around the development of low cost, easy to build systems that improve the accessibility and efficiency of measurement and characterization methods.
By facilitating high throughput characterization through affordable, open-source technologies, such systems will enable materials researchers in underserved regions to accelerate progress in key areas such as green technology development.
Research Projects
1. Mara Spectrometer, an automated spectrometer gantry to enable high-throughput characterization of perovskites.
The design philosophy focused on creating a compact, simple, and easy-to-build device. When idle, the overhead probe lies outside the workspace to enable direct pipetting onto the lab plate. During scanning, the plate moves gradually as the probe scans across. The operation is controlled by an Arduino and 2 stepper motors to move the plate carriage and probe (Fig. 2, 3).
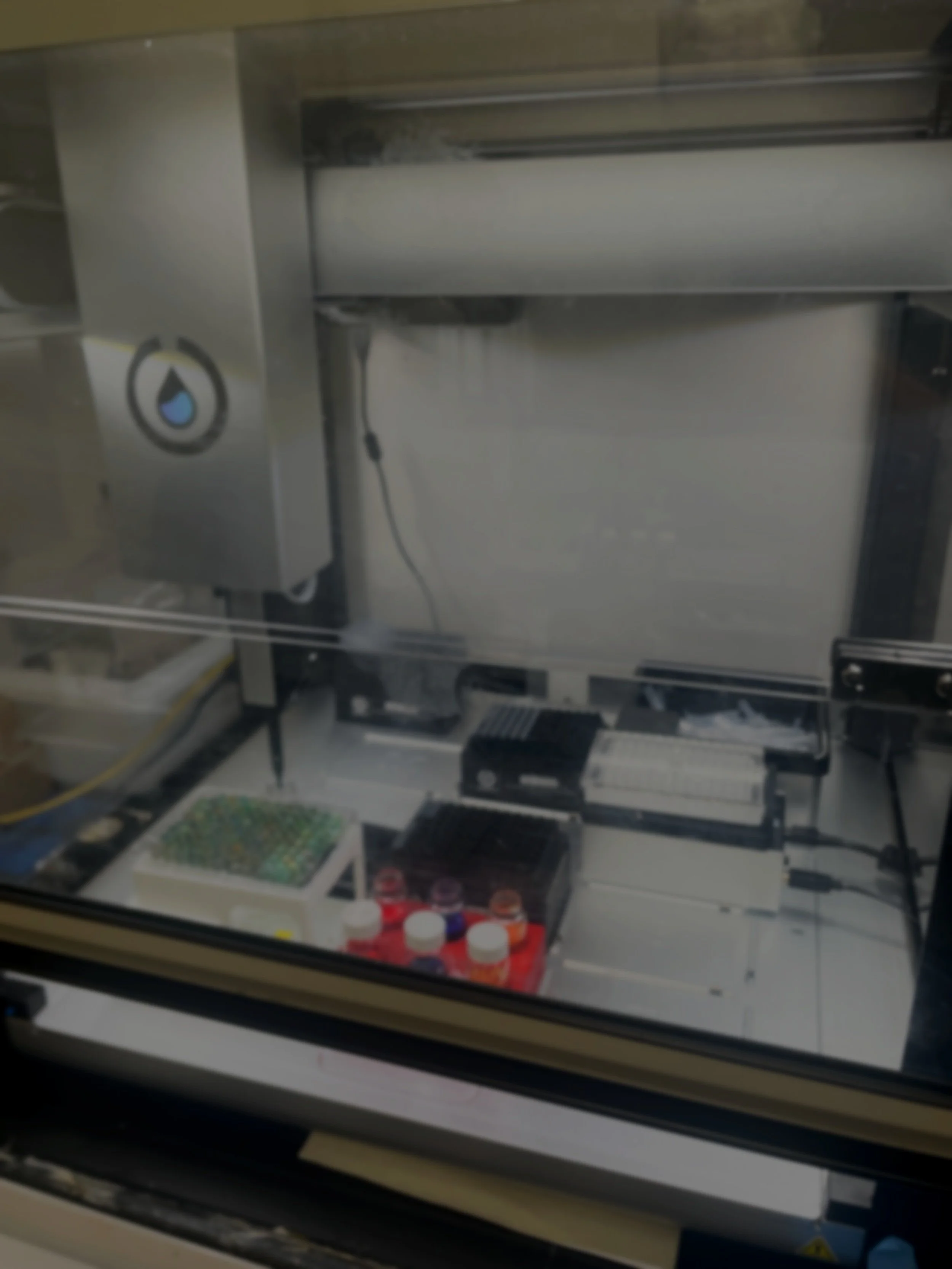
The device is used together with the Opentron OT-2 robot (Fig. 1).
It has already proven use in quickly identifying patterns in the peak intensities of perovskite films (Fig. 4,5,6).
Figure 4. Variation of photoluminescent peak intensity in relation to the concentration of Chlorine and Bromine. Credit: Zuyang Ye

Video: The spectrometer scanning a custom printed 12-well plate.

Figure 2. Mechanisms within the spectrometer gantry. A: The probe above the glass plate B: The probe holder is driven by a belt system. C: The plate carrier rests on 2 linear rails, with 2 elastic latches in blue. D: Plate driven by a lead screw.

Figure 1. Mara Spectrometer with an ocean optics probe (back left) and MaraCam (front left) in the Opentron workspace.

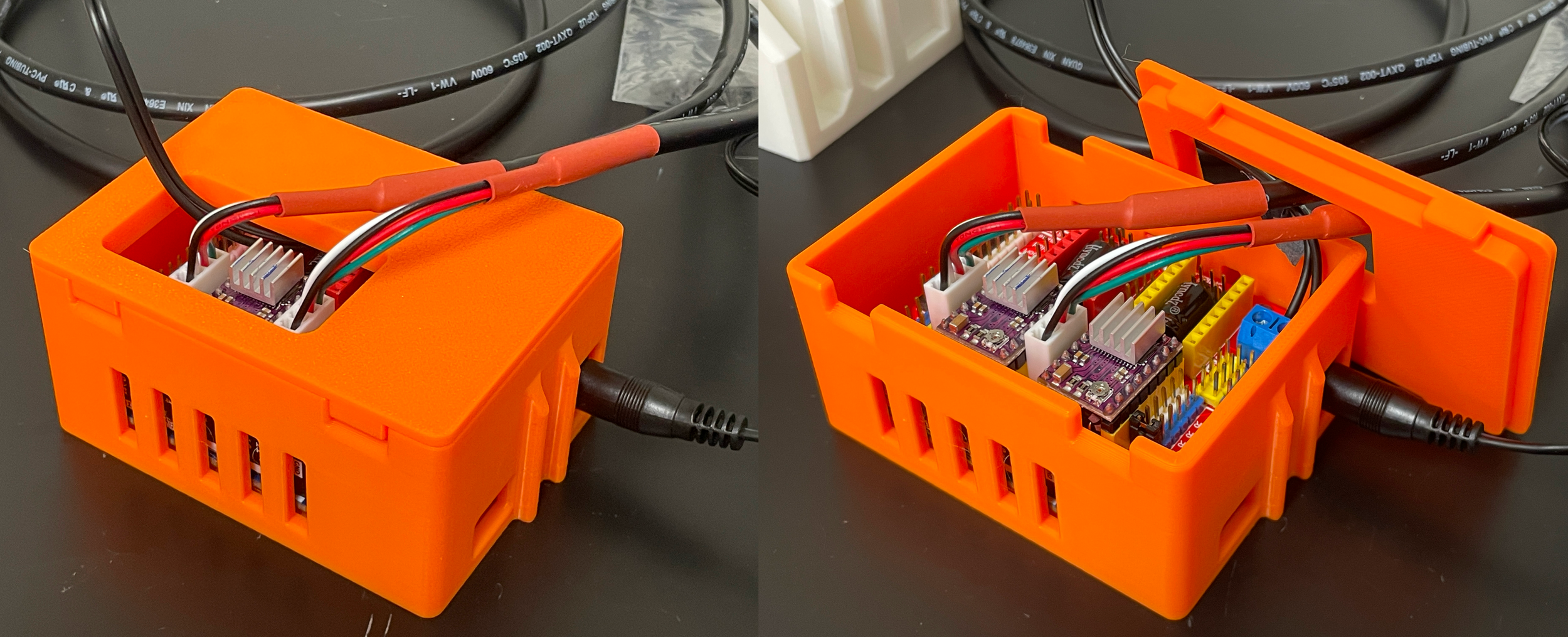
Figure 3. Electronics case for the gantry, housing an Arduino, CNC shield and stepper motor drivers.

Figure 5 and 6. Variation of intensity decay rate in relation to anneal time and measurement location. Each line is separated by 3 seconds in time.
Prototyping Process

Figure 7. Phase 1 of prototyping for the Spectrometer, as of Nov. 2024
During the project, I worked through a lengthy stage of development, from trade studies, concept sketching, peer discussions, detailed CAD, to 3D printed prototyping/troubleshooting. The initial design phase was particularly difficult, as it had to meet a tight space requirement while using minimal moving parts.
As a self-guided project, I was not only able to refine my technical skills in mechanical design, but also improve my ability to approach open ended problems, and to know when to reach out for help and feedback to maintain good progress.
I am now working on an Open-Source Hardware publication for this project set to publish April 2025.
2. Mara Camera Module


MaraCam is an open-source, 3D-printed RGB imaging tool compatible with the Opentron OT-2 workspace.
Running Raspberry Pi OS, it is fitted with a 12MP Arducam IMX708 wide angle camera.
Specifications:
Compatible with clear 96 well plates.
152° diagonal FOV camera capable of imaging the underside of a 96 well plate.
User-customizable to fit a variety of cameras and raspberry pi models.
Maximum dimensions (Extruded Raspberry Pi holder): 141.5 (L) x 100 (W) x 82 (H)
Attachment dimensions:
Bottom Opentron attachment: 127 x 85 mm
Top 96 well-plate: 123.94 x 80.96 mm (Inner)

Another member of the Mara team, Vattenary, recently upgraded the camera module with an IMX219 auto-focus camera, and completed the workflow for digital color analysis.

Improved Imaging
Scrapped MaraCam concepts:
Thorlabs camera mount (Top)
Adjustable camera arm (bottom left)
Overhead wired camera gantry (bottom right)






Digital Color Analysis